Descripción
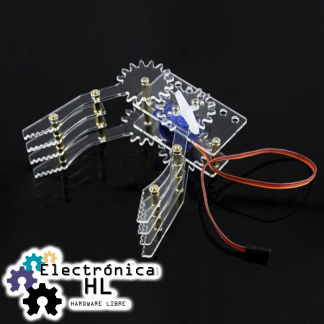
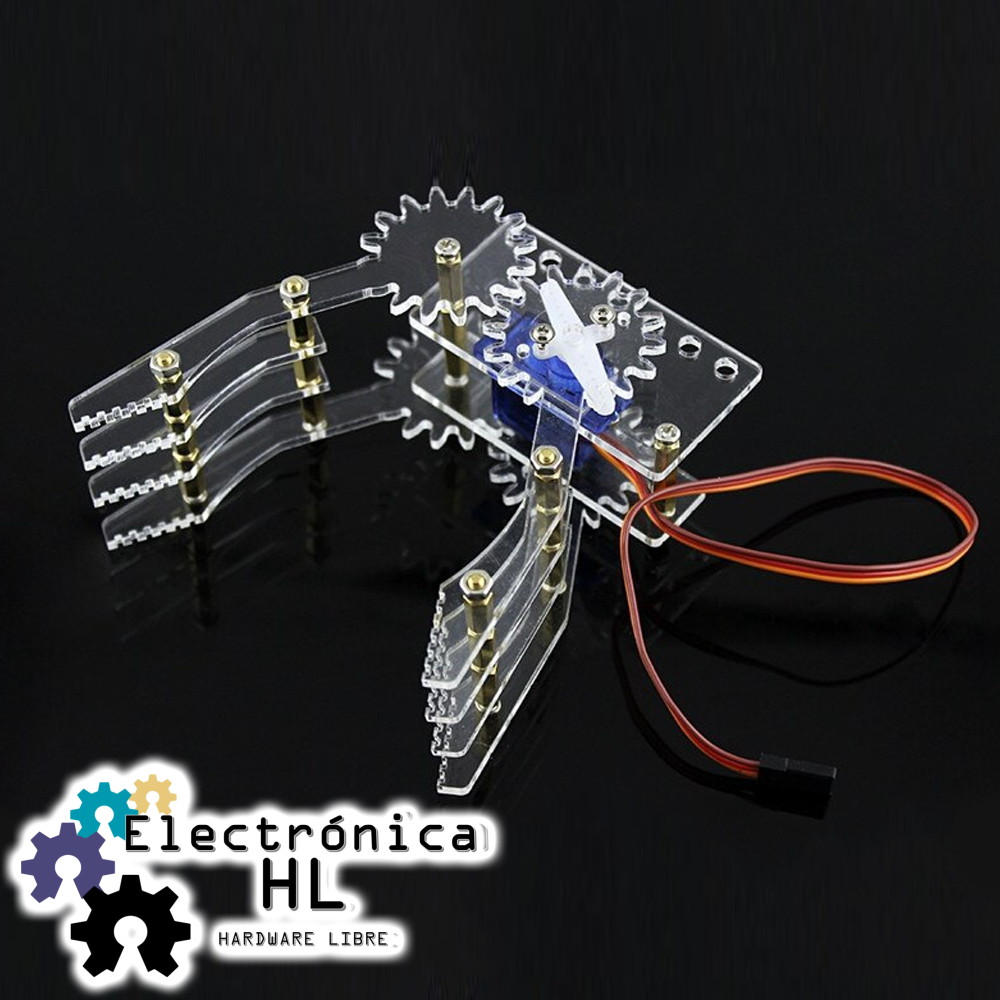
Pinza tipo gripper diseñada para su uso en brazos robóticos, que permite la sujeción y manipulación de objetos con precisión. Compatible con diversos modelos de manipuladores robóticos.
Especificaciones:
- Tipo de actuador: servomotor
- Material: plástico ABS y metal para partes móvileS
Características:
- Diseño ligero y resistente
- Movimiento de apertura y cierre controlado
- Fácil instalación y ajuste